तुल्यकालिक मोटर क्या है
तुल्यकालिक घूर्णन – गति पर वैद्युतिक ऊर्जा को यान्त्रिक ऊर्जा में परिवर्तित करने वाली मशीन तुल्यकालिक मोटर कहलाती है ।
यदि किसी आल्टरनेटर के स्टेटर को डी . सी . तथा उसके रोटर को ए . सी . स्रोत से संयोजित कर दिया जाए तो वह तुल्यकालिक मोटर की भाँति कार्य करने लगता है । आल्टरनेटर तथा तुल्यकालिक मोटर की संरचना लगभग एक समान होती है ।
यदि समानान्तर – क्रम में संयोजित दो कार्यरत आल्टरनेटर्स में से एक को यान्त्रिक ऊर्जा प्रदान करना बन्द कर दें तो वह तुल्यकालिक मोटर को भाँति कार्य करने लगता है , इस स्थिति में उससे यान्त्रिक ऊर्जा प्राप्त की जा सकती है ।
तुल्यकालिक मोटर स्वयं चालू ( self start ) नहीं होती है । इस मोटर को तुल्यकालिक घूर्णन – गति पर घुमाने के लिए प्रारम्भ में यान्त्रिक ऊर्जा को आवश्यकता होती है । एक बार तुल्यकालिक घूर्णन गति प्राप्त कर लेने पर यह उसी निर्धारित गति पर घूर्णन करती रहती है और इससे लोड संयोजित किया जा सकता है ।
तुल्यकालिक मोटर की महत्त्वपूर्ण विशेषता इसकी नियत घूर्णन – गति है , इसीलिए , ऐसे कार्यों में जिनमें नियत घूर्णन गति अति आवश्यक हो , तुल्यकालिक मोटर प्रयोग की जाती है ।
तुल्यकालिक मोटर किस सिद्धान्त पर कार्य करते हैं
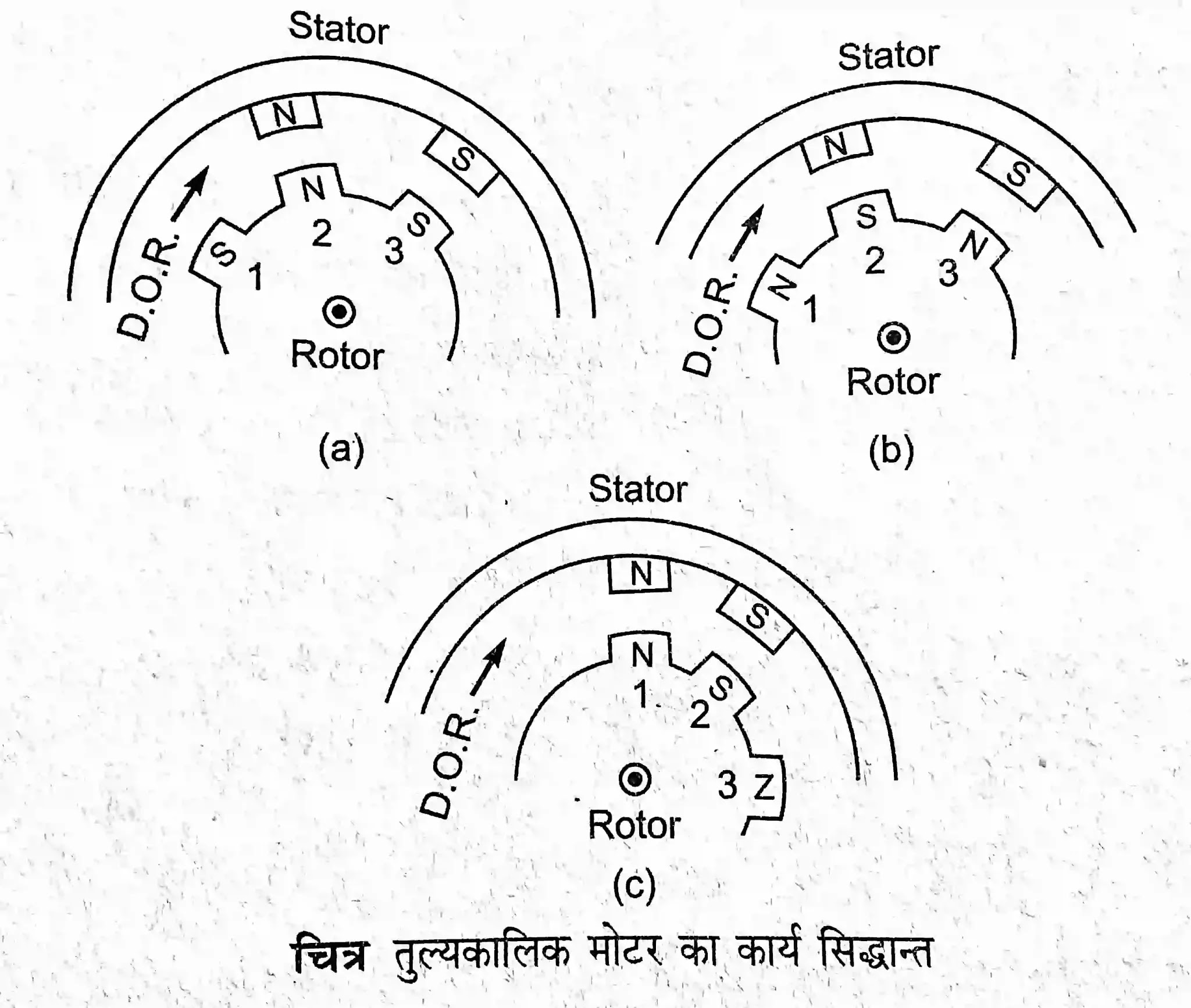
इस मोटर के कार्य सिद्धान्त को चित्र के माध्यम से समझाया गया है । इसमें डी . सी . सप्लाई द्वारा उत्तेजित दो स्थिर स्टेटर पोल N तथा S दर्शाए गए है । 1.2.3 आर्मेचर पोल्स हैं । आर्मेचर पोल्स की ध्रुवता , स्रोत फ्रीक्वेन्सी के अनुसार परिवर्तित होती रहती है ( ध्यान रखें कि आर्मेचर का वैद्युत स्रोत ए . सी . रखा जाता है । )
माना किसी क्षण पर आमेचर पोल्स 1,2,3 की ध्रुवता क्रमश : S – N – S है । इस क्षण में , रोटर में एक ऐसा टॉर्क उत्पन्न होगा जो उसे दक्षिणावर्त ( clockwise ) दिशा में घुमाने का प्रयास करेगा , देखें चित्र ( a ) । दूसरे ही क्षण , रोटर पोल्स 1 , 2 , 3 की ध्रुवता परिवर्तित होकर क्रमश : N – S – N हो जाती है , देखें चित्र ( b ) । इस क्षण में रोटर में एक ऐसा टॉर्क उत्पन्न होगा जो वामावर्त ( anti – clockwise ) दिशा में घुमाने का प्रयास करेगा , क्योंकि पोल्स की ध्रुवता परिवर्तित होने का समय बहुत कम ( प्राय : 1/50 सेकण्ड ) होता है , फलतः रोटर स्थिर ही रहेगा और उसकी घूर्णन – गति शून्य रहेगी ।
इस प्रकार , यह स्पष्ट है कि इस मोटर को स्वयं चालू ( self start ) बनाने के लिए इसके रोटर को इतनी घूर्णन – गति पर घुमाना आवश्यक है कि जितने समय में रोटर पोल्स अपनी ध्रुवता परिवर्तित करते हैं उतने समय में रोटर , एक पोल्स – पिच दूरी तय कर ले , देखे चित्र ( c ) | परिणामतः रोटर पर पुनः दक्षिणावर्त दिशा में कार्यरत टॉर्क प्राप्त हो जाएगा और वह लगातार घूर्णन करता रहेगा ।
प्रयोगात्मक रूप से तुल्यकालिक मोटर के स्टेटर पर 3 – फेज वाइण्डिग स्थापित की जाती है और उसे 3 – फेज ए . सी . स्रोत से संयोजित किया जाता है रोटर पर डीसी मोटर के आर्मेचर की भांति वाइंडिंग स्थापित की जाती है और उसे डीसी से संयोजित किया जाता है
उत्तेजन के परिवर्तन का प्रभाव Effect of Change of Excitation
तुल्यकालिक मोटर के पावर फैक्टर की मात्रा उत्तेजन को घटा बढ़ाकर परिवर्तित की जा सकती है । उत्तेजन के कारण निम्नलिखित तीन स्थितियाँ अस्तित्व में आती हैं
( i ) जब E , < V , इस समय रोटर की एक्साइटेशन कमजोर होती है । यह कम एक्साइटिड ( under excited ) होता है । I , से ° पीछे रहता है तथा V से ∅°का लैग कोण ( lag angle ) बनाता है । इस कारण मोटर पश्चगामी पावर फैक्टर पर चलती है ।
( ii ) जब E = V इस समय रोटर एक्साइटेशन बढ़ाकर E , को V के बराबर कर दिया जाता है । I , तथा V एक फेज ( phase ) में आ जाते हैं । इस समय फैक्टर इकाई के बराबर हो जाता है ।
( iii ) जब E , > V इस समय रोटर की एक्साइटेशन नॉर्मल से अधिक होती है । E , मात्रा में V से बढ़ जाती है । इस कारण I , V से आगे निकल जाता है या लीड करता है । इसी कारण मोटर का पावर फैक्टर लीडिंग प्रकृति का हो जाता है ।
तुल्यकालिक मोटर्स कितने प्रकार के होते हैं
तुल्यकालिक मोटर्स मुख्यतः निम्न दो प्रकार की होती हैं ।
1. सामान्य तुल्यकालिक मोटर
2. ऑटो तुल्यकालिक मोटर ।
सामान्य तुल्यकालिक मोटर Plain Synchronous
Construction
सामान्य प्रकार की तुल्यकालिक मोटर की संरचना , 3 – फेज आल्टरनेटर के समान होती है । इसमें निम्न चार मुख्य भाग होते हैं
( i ) स्टेटर ( Stator ) ,
( ii ) रोटर ( Rotor ) .
( iii ) एक्साइटर ( Exciter )
( iv ) प्राइम – मूवर ( Prime Mover )
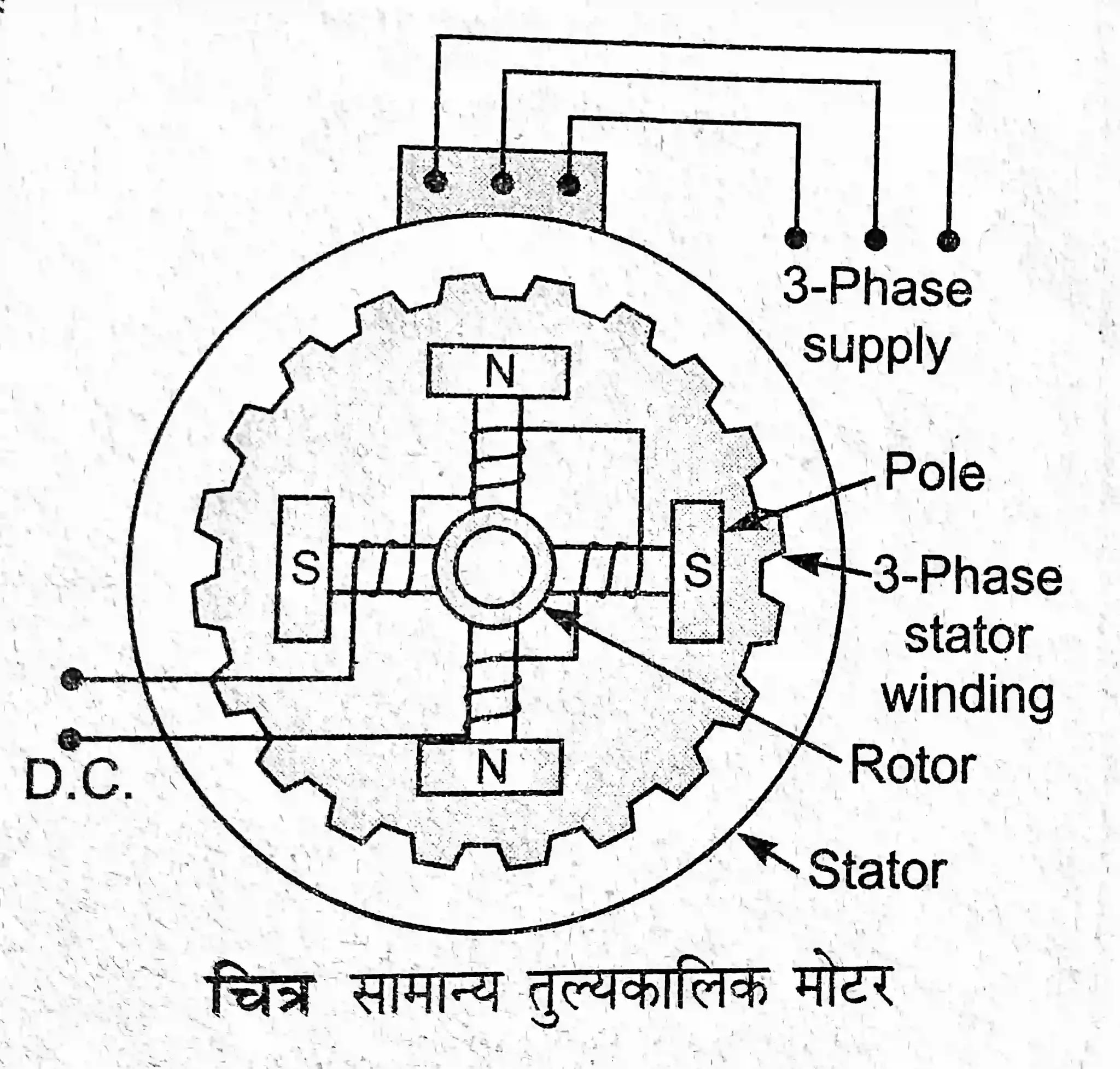
3 – Phase supply स्टैटर पर 3 – फेज वाइण्डिग स्थापित की जाती है और रोटर पर स्थायी ध्रुवता पैदा करने वाले डी . सी . उत्तेजित पोल्स स्थापित किए जाते हैं । रोटर पोल्स की संख्या , मोटर की निर्धारित तुल्यकालिक घूर्णन गति के अनुसार , P = 120 x f/N उदाहरणार्थ 1500 R.P.M. वाली 3 – Phase मोटर के लिए 4 पोल्स बनाए जाते है ) ही रखी जाती है । रोटर पोल्स को डी.सी.प्रदान करने के लिए मोटर को शाफ्ट से एक छोटा डी . सी . शंट जनित्र ( 110V से 250V ) जोड़ दिया जाता हैं D.c. जिसे ‘ एक्साइटर ‘ कहते हैं ।
कार्य प्रणाली Working System
यद्यपि स्टेटर 3 – फेज वाइण्डिग एक ‘ घुमने वाला चुम्बकीय क्षेत्र ‘ ( rotating magnetic field ) स्थापित करती है तो भी स्टेटर पोल्स को ध्रुवता निरन्तर परिवर्तित होते रहने के कारण , रोटर स्वत : ही घूर्णन नहीं कर पाता । इसलिए रोटर को किसी प्राइम मूवर के द्वारा तुल्यकालिक गति पर घुमाया जाता है । जैसे ही रोटर , तुल्यकालिक गति प्राप्त कर लेता है तो प्राइम – मवर को हटा दिया जाता है और मोटर स्वतः ही तुल्यकालिक – गति पर घूर्णन करती रहती है ।
विशेषताएँ Characteristics
लाभ Advantage
( i ) सामान्य – लोड तथा शून्य – लोड पर तुल्यकालिक मोटर की घूर्णन गति अपरिवर्तित रहती है । निधारित लोड से अधिक लोड पर घूर्णन – गत्ति घट जाती है और मोटर रुक जाती है
( ii ) स्टेटर की चु . क्षेत्र उत्तेजना ( field excitation ) को घटाने पर पिछड़ती हुई विद्युत धारा ( lagging current ) तथा स्टेटर की चुम्बकोय क्षेत्र उत्तेजना को बढ़ाने पर आगे बढ़ती हुई विद्युत धारा ( leading current ) प्राप्त होती है । इस प्रकार , क्षेत्र उत्तेजना को परिवर्तित करके मोटर का पॉवर – फैक्टर परिवर्तित किया जा सकता है ।
(iii ) वोल्टेज के घटने – बढ़ने का मोटर की घूर्णन गति पर सूक्ष्म प्रभाव पड़ता है । 5-10 % से अधिक वोल्टेज परिवर्तन पर मोटर रुक जाती है ।
हानियाँ Disadvantage
( i ) मोटर का स्टार्टिंग टॉर्क लगभग शून्य होता है अत : यह मोटर लोड पर चालू नहीं हो पाती ।
( ii ) मोटर को चालू करने के लिए ए . सी . तथा डी . सी . स्त्रोत एवं प्राइम – मूवर आवश्यक होता है ।
( iii ) मोटर को घूर्णन गति को घटाया या बढ़ाया नहीं जा सकता ।
( iv ) इस मोटर में ‘ हंटिंग ( hunting ) दोष विद्यमान होता है जिसके कारण लोड में थोड़ी – सी भी वृद्धि हो जाने पर मोटर का रोटर कम्पन ( oscillate ) करने लगता है ।
इण्डक्शन टाइप ऑटो तुल्यकालिक मोटर Induction type auto synchronous Motor
संरचना Construction
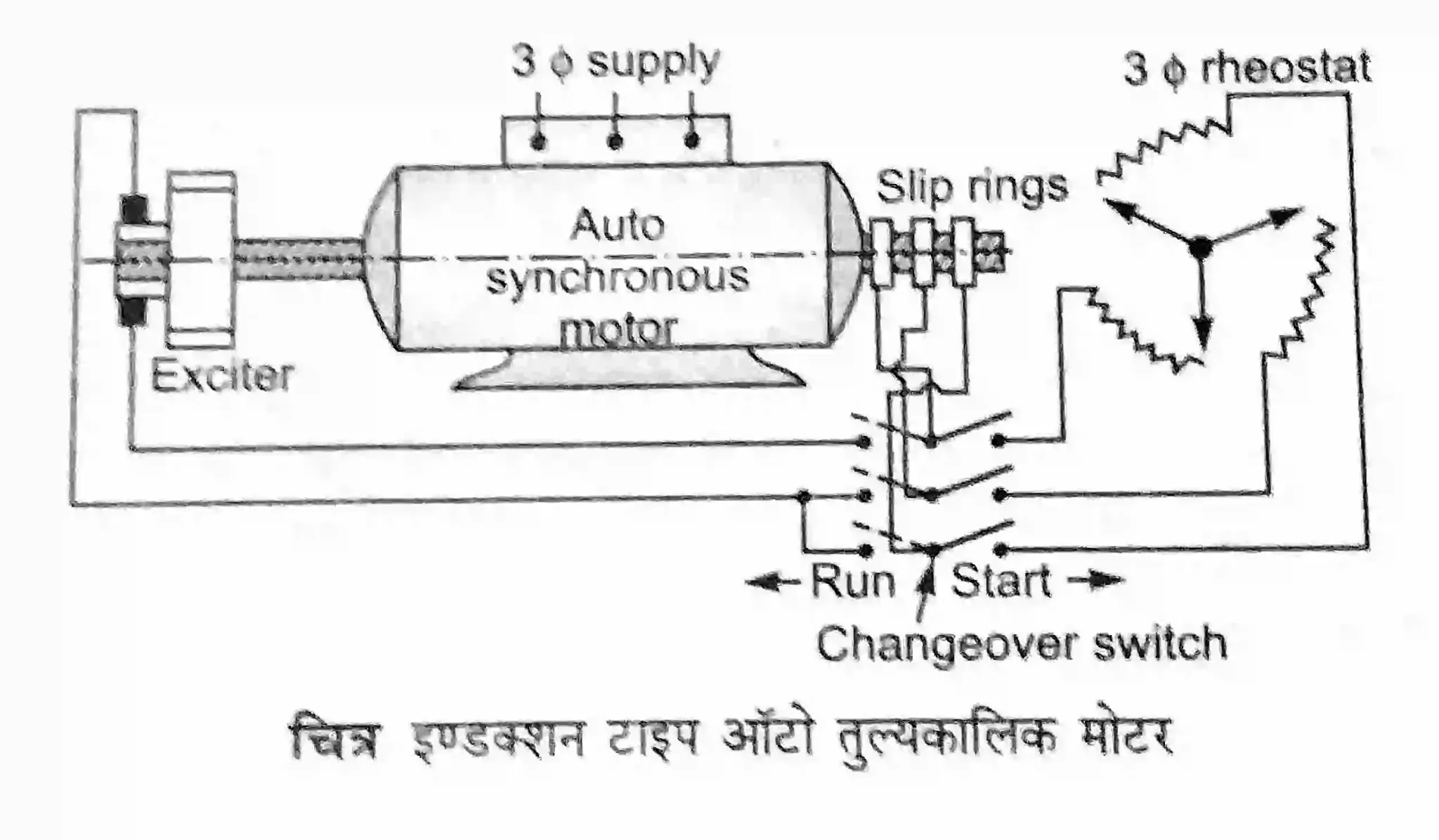
इस प्रकार की मोटर के रोटर पर 3 – फेज स्लिप – रिंग वाइण्डिग स्थापित की जाती है । 3 – फेज स्लिप – रिंग इण्डक्शन मोटर की भाँति ही 3 – फेज वाइण्डिग्स को एक बाह्य 3 – फेज रिहोस्टेट से संयोजित किया जाता है । मोटर की शाफ्ट पर एक ओर 3 – स्लिप – रिंग्स तथा दूसरी ओर ‘ एक्साइटर स्थापित किया जाता है ।
कार्य प्रणाली Working System
प्रारम्भ में यह मोटर , स्लिप – रिंग इण्डक्शन मोटर की भाँति स्वयं चालू हो जाती है । जब मोटर , तुल्यकालिक घूर्णन – गति प्राप्त कर लेती है तो एक चेंजओवर स्विच के द्वारा बाह्य 3 – फेज रिहोस्टेट को परिपथ से बाहर कर दिया जाता है और चित्र की भाँति रोटर वाइण्डिग्स को एक्साइटर ‘ ( डी.सी. शंट जनित्र ) से संयोजित कर दिया जाता है । ‘ रन ‘ स्थति में यह मोटर , तुल्यकालिक मोटर की भाँति कार्य करती रहती है । रोटर की एक वाइण्डिग में पूर्ण रोटर धारा तथा शेष दो वाइण्डिरस में आधी रोटर धारा प्रवाहित होती है , परन्तु इससे मोटर की कार्य – प्रणाली पर कोई विशेष प्रभाव नहीं पड़ता ।
Characteristics
( i ) यह मोटर लोड पर भी स्वयं चालू हो जाती है
( ii ) इस मोटर को चालू करने के लिए ‘ प्राइम मूवर ‘ की आवश्यकता नहीं होती ।
( iii ) यह मोटर इकाई पॉवर – फैक्टर पर कार्य करती है ।
अनुप्रयोग Application
यह मोटर सीमेन्ट , रोलिंग , कॉटन तथा पेपर मिलों में भारी लोड पर कार्यों में भी नियत घूर्णन – गति पर यान्त्रिक ऊर्जा प्रदान करने के लिए प्रयोग की जाती है ।
कम वोल्टेज पर कार्य करने वाली छोटी ऑटो तुल्यकालिक मोटर्स में रोटर वाइण्डिग को सीधे ही ‘ एक्साइटर ‘ से संयोजित कर दिया जाता है जिससे चेंजओवर स्विच प्रयोग नहीं करना पड़ता
सैलिएन्ट पोल टाइप ऑटो तुल्यकालिक मोटर Salient Pole Type Auto Synchronous Motor
संरचना Construction
इस प्रकार की मोटर के रोटर पर ‘ सैलिएन्ट ‘ अर्थात् उभरे हुए पोल्स बनाए जाते हैं । इन पोल्स पर गहराई में स्थायी ध्रुवता पैदा करने वाली व डी.सी. से उत्तेजित की जाने वाली वाइण्डिग्स स्थापित की जाती है । इसके साथ ही पोल्स के उभरे भाग में स्क्विरल केज रोटर की भांति ‘ शॉर्ट – सर्किटेड ताँबे के चालक स्थापित किए जाते हैं । रोटर वाइण्डिग्स को सामान्य तुल्यकालिक मोटर की भाँति ‘ एक्साइटर ‘ से संयोजित कर दिया जाता है ।
कार्य प्रणाली Working System
स्क्विरल केज प्रकार का रोटर होने के कारण , स्टेटर को 3 – फेज सप्लाई से संयोजित करने पर यह मोटर स्वयं चालू हो जाती है ; परन्तु मोटर , हल्के लोड पर ही स्वयं चालू हो सकती है , भारी लोड पर नहीं । जब रोटर पर्याप्त घूर्णन – गति प्राप्त कर लेता है और एक्साइटर ‘ पर्याप्त डी . सी . वोल्टेज प्रदान करने लगता है तो यह मोटर , तुल्यकालिक मोटर की भाँति कार्य करने लगती है
विशेषताएँ Characteristics
( i ) इस प्रकार की मोटर केवल हल्के लोड पर ही स्वयं चालू हो सकती है , भारी लोड पर नहीं । ( भारी लोड के लिए इण्डक्शन टाइप तुल्यकालिक मोटर ही उपयुक्त रहती है । )
( ii ) इसमें बाह्य रिहोस्टेट तथा चेंजओवर स्विच की आवश्यकता नहीं होती ।
अनुप्रयोग Application
इस मोटर को विद्युत वितरण लाइन के समानान्तर – क्रम में संयोजित कर , लाइन का पॉवर – फैक्टर सुधारने के लिए प्रयोग किया जाता है ।
जब किसी सामान्य तुल्यकालिक अथवा ऑटो तुल्यकालिक मोटर को पॉवर – फैक्टर सुधारने के लिए प्रयोग किया जाता है तो उसे तुल्यकालिक कन्डेन्सर भी कहते है ।